Learning Efficient Abstract Planning Models that Choose What to Predict
Abstract
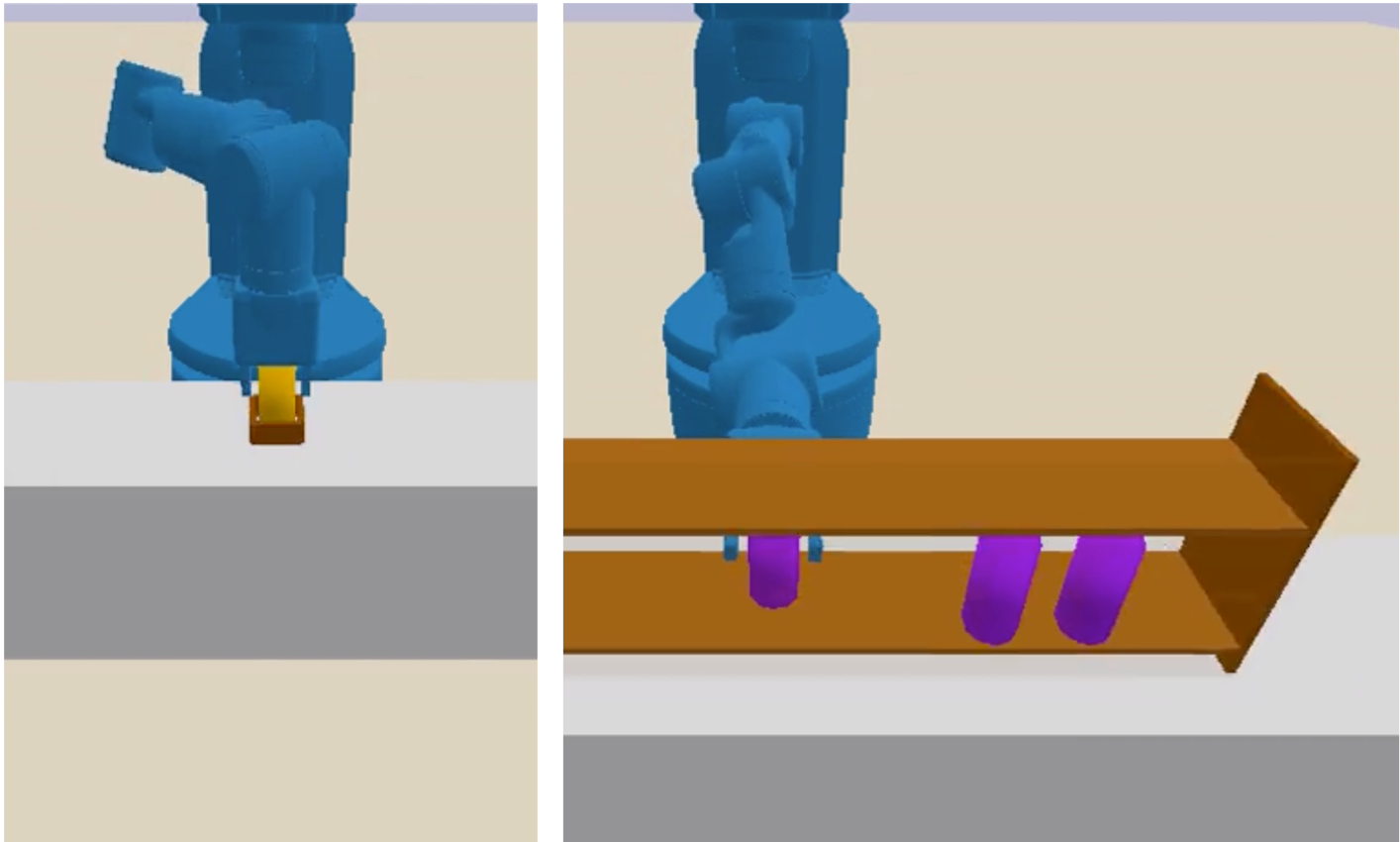
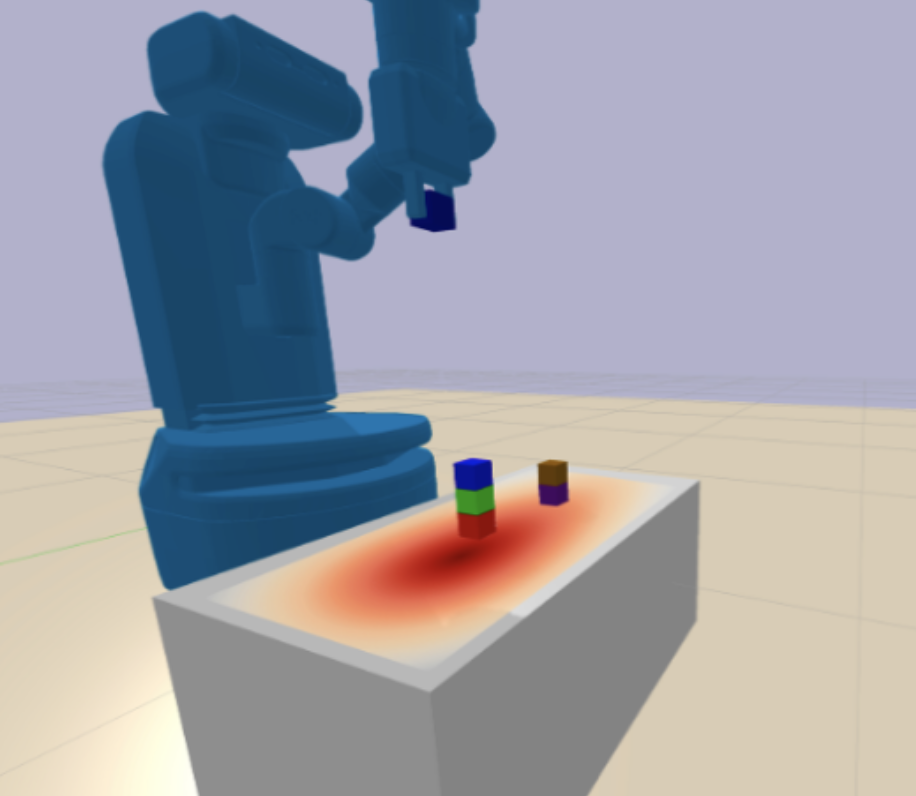
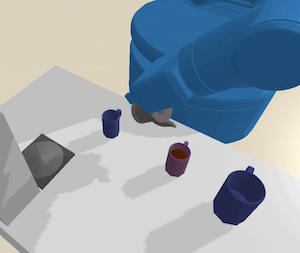
An effective approach to solving long-horizon tasks in robotics domains with continuous state and action spaces is bilevel planning, wherein a high-level search over an abstraction of an environment is used to guide low-level decision-making. Recent work has shown how to enable such bilevel planning by learning abstract models in the form of symbolic operators and neural samplers. In this work, we show that existing symbolic operator learning approaches fall short in many robotics domains where a robot's actions tend to cause a large number of irrelevant changes in the abstract state. This is primarily because they attempt to learn operators that exactly predict all observed changes in the abstract state. To overcome this issue, we propose to learn operators that 'choose what to predict' by only modelling changes necessary for abstract planning to achieve specified goals. Experimentally, we show that our approach learns operators that lead to efficient planning across 10 different hybrid robotics domains, including 4 from the challenging BEHAVIOR-100 benchmark, while generalizing to novel initial states, goals, and objects.
Related Resources
Check out a list of our related papers that learn the components necessary to perform bilevel planning/task and motion planning from demonstrations.

An overview blog post that introduces the bilevel planning algorithm from first principles and illustrates its application to tasks from the BEHAVIOR-100 benchmark.
We propose a bottom-up relational approach for learning operators for task and motion planning. Our approach can be seen as a "model-based" learning approach to TAMP. We compare with several model-free baselines.
We learn neuro-symbolic and relational state and action abstractions from demonstrations. The abstractions are explicitly optimized for effective and efficient bilevel planning.
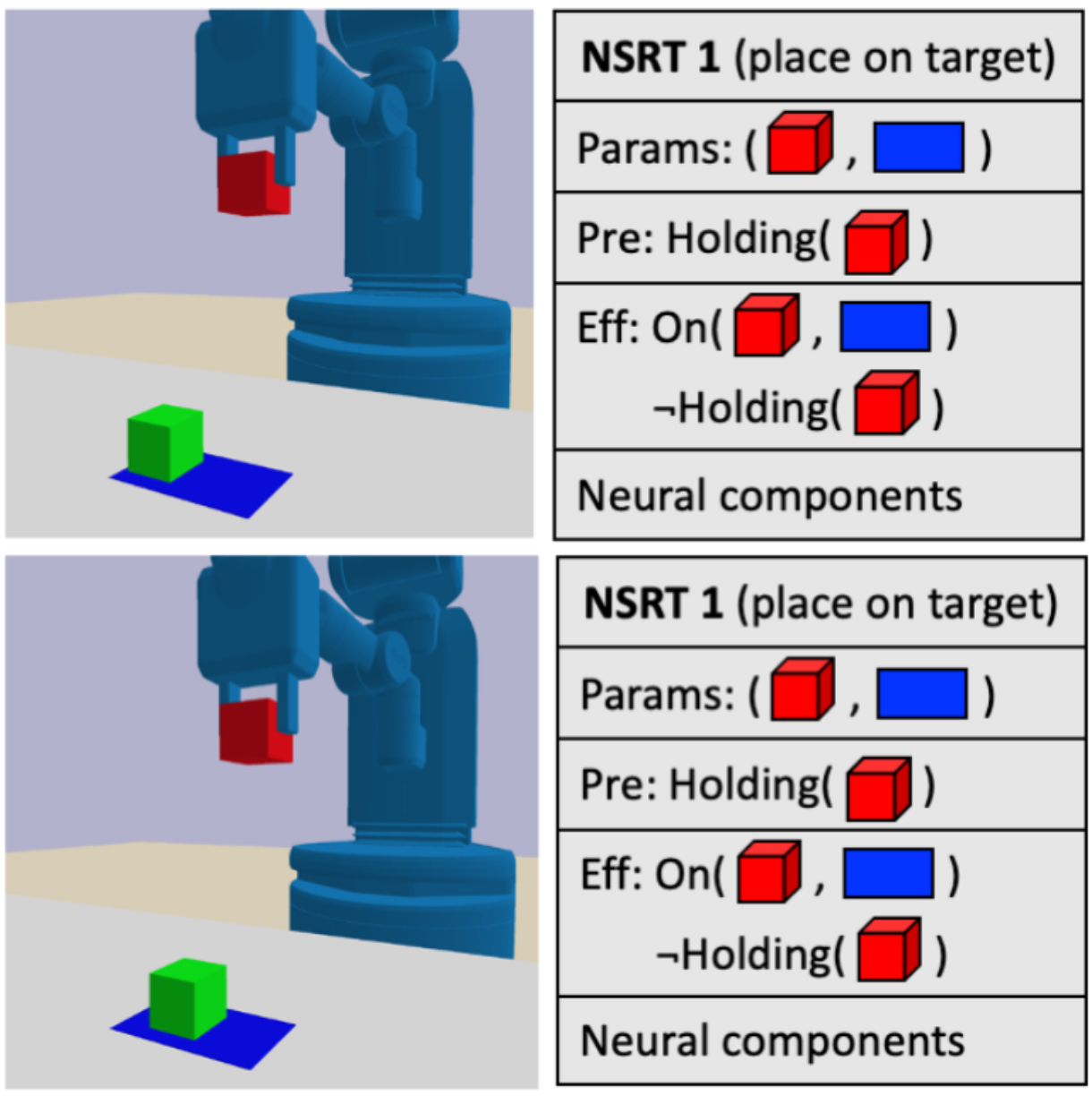
We propose Neuro-Symbolic Relational Transition Models (NSRTs), a novel class of transition models that are data-efficient to learn, compatible with powerful robotic task and motion planning methods, and generalizable over objects.
We learn neuro-symbolic skills with goal-conditioned policies from demonstrations and symbolic predicates. The learned skills can be used with bilevel task and motion planning techniques.
Acknowledgements
We gratefully acknowledge support from NSF grant 2214177; from AFOSR grant FA9550-22-1-0249; from ONR MURI grant N00014-22-1-2740; from ARO grant W911NF-23-1-0034; from the MIT-IBM Watson AI Lab; from the MIT Quest for Intelligence; and from the Boston Dynamics Artificial Intelligence Institute. Nishanth, Willie, and Tom are supported by NSF Graduate Research Fellowships. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of our sponsors. Additionally, we thank Jorge Mendez and Aidan Curtis for helpful comments on earlier drafts of our paper.This webpage template was recycled from here.